


There are a wide variety of noise sources present in the underwater environment, but the main, consistent contribution comes from only a few types. Ambient noise, unlike other sources, does not come from a particular direction or source. The noise level is the same everywhere in the local area.
Passive accoustic sources fall into two main categories: broadband and narrowband sources.
Broadband sources create acoustic energy over a wide range of frequencies, similar to a thermal source in electro-optics. Typical broadband sources are noise from either the propeller/shaft, flow noise and some propulsion systems. Noise from the propeller and shaft is generally at low frequency, meaning less than 1000 Hz. The rate of rotation can amplitude modulate the noise, and this propeller blade rate tonal noise can be detected and demodulated to measure the shaft or propeller blade rate. Narrowband sources radiate within a small band about a particular frequencies, or class of frequencies. Typical sources are the various pieces of machinery found in every ship, including example, pumps, motors, electrical generation equipment and propulsion systems. When specifying narrowband sources, it is important to also specify the frequency at which it occurs.Cavitation noise is produced from the motion of turning propellers on surface vessels, submarines or a torpedoes. Cavitation is the formation of partial vacuums in a flowing liquid as a result of the separation of its parts. When these partial vacuums bubbles collapse, they produce cavitation noise, which sounds like a pulsed note and can be heard at considerable ranges, depending on the size of the propeller and the speed of rotation. A torpedo produces a very high pitched and fast rotation noise. Distinctive propeller blade broadband cavitation noise can render a submarine detectable by passive sonar systems. Generally, the level of noise from a ship increases with ship size and speed. The loudest noise from normal ship operation comes from cavitation of the propeller, which adds 10-15 dBA to the noise level of regular operation.
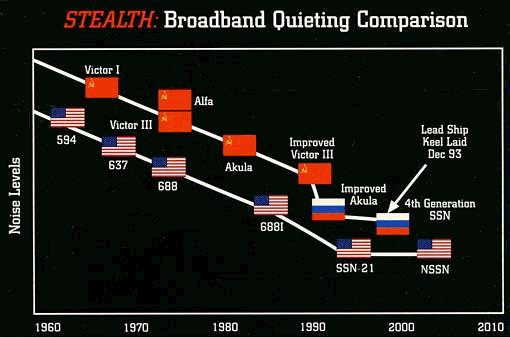
The tactical speed of a submarine is that speed at whichthe submarine is quiet enough to remain undetected while tracking enemy submarines effectively, with sources of self-noise reduced to the point that other submarines and ships can be detected using onboard passive sonar sensors. The the maximum burst speed of a submarine is the highest speed that can be achieved by the submarine's propulsion system, regardless of the self-noise created in the process. In the past, the tactical speed of a submarine was typically significantly less than its burst speed, though in the case of the SSN-21 Seawolf it is said that the tactical speed of 25 knots is a significant fraction of the burst speed of the boat.
The largest variation is the speed of sound in water occurs with changes is depth. Obviously the pressure increases with depth causing a uniform increase of +1.7 m/s for every 100 meters. Furthermore, the ambient temperature changes with depth. A plot of propagation speed (velocity) as a function of depth, is called the sound velocity profile (SVP), and it is the fundamental tool for predicting how sound will travel. Neglecting salinity, the SVP can be obtained from sampling the ambient temperature at various depths (the pressure contribution never varies). The water can be divided into three vertical regions.
The Deep Sound Channel is a subsurface duct for long-range transmission of acoustic signals. Also known as the SOFAR (SOund Fixing And Ranging) channel, this channel occurs at an average depth of one kilometer where the speed of sound in sea water is slowest (about 1480 meters per second). The Axial depth of the channel, which is the depth of minimum sound speed between the sea surface and the ocean floor, is also called the primary sound channel. Sound does not propagate well in water with a depth less than or equal to it's wavelength because it is scattered, reflected and refracted by the sea surface and bottom, causing the sound to dissipate. The The Deep Sound Channel is formed at depths greater than the wavelength of the cutoff frequency. The Deep Layer is isothermal, but characterized by a positive gradient due to pressure affect on sound velocity. Provided the water is deep enough, there will be sufficient velocity increase to turn sound rays back around towards surface, leading to a convergence zone effect. Once sound enters the channel, it remains in the channel until it dissipates: increasing temperature at the upper-bound of the channel causes sound to refract down into the channel, and increasing pressure at the lower-bound of the channel causes sound to refract up into the channel.The Sonic Layer Depth (SLD) is the depth of maximum sound speed above the deep sound channel axis. Channel thickness is the depth interval between the sound speed maxima denoting the top and bottom of the sound channel. More than one, or multiple channels, may occur on the same profile. Zero Layer Depth is a special case where Sonic Layer Depth occurs at the surface, which happens most frequently in tropical and subtropical regions where surface winds are insufficient to cause mixing.
The Surface Channel is an acoustic duct between the sea surface and the sonic layer depth. The Near-surface Layer is the layer extending from the sea surface to sonic layer depth. A Half Channel is a special case where the sound speed profile exhibits a minimum at the sea surface and a maximum at the sea floor. By definition, neither sonic layer nor sound channels may occur in a half channel. Normally this is a winter phenomenon associated with polar regions and the Mediterranean Sea. A Secondary Sound Channel is a sound channel located between sonic layer depth and the axial depth of the deep sound channel. Also called a near-surface sound channel to distinguish it from the deep sound channel.
The Best Depth for a submarine to avoid detection by a hull-mounted sonar is conventionally regarded as the Sonic Layer Depth plus 100 meters. This assumption is based on the premise that maximum downward refraction of sonic energy will occur at the depth of the strongest minimum sound speed gradient, thus causing short horizontal sonar ranges. The depth of the bottom of the surface layer of water is a great determinant of sonar performance from a hull-mounted surface-ship sonar because the target submarine may choose to proceed below the layer. Cross-layer detection is usually limited in range because of the refraction or bending of the sound rays. Shallow layers favor the submarine going deep below the layer to detect the surface ship's radiated noise when its active sonar transmission is trapped in the surface layer and/or refracted sharply downward. The tactical answer to this situation from the escort point of view is to vary the vertical angle of transmission of his sonar projector so as to penetrate the layer, or to deploy a variable-depth sensor below the layer.
These layers mark the transition from positive to negative temperature and salinity gradients, which are good operating points for a submarine such as a boomer to sit and be hard to detect, since sound waves radiate away from such a point. This is also a bad point or the boat to listen (for the same reason); so there is a best depth to listen and a different best depth to avoid detection. In deep water a towed array can be deployed from the best depth to avoid detection and combine the best of both worlds. But towed arrays would not be used in shallow water.
Requirements for submarine periscope depth operations have been increased by integration with carrier battle groups, littoral operations, and contributions to joint surveillance. Improved periscope depth performance is therefore imperative. Submarines normally achieve satisfactory trim at 150 ft and 1/3 bell propulsion setting (about 5-6 knots). In review of the sound velocity profile (SVP) the dive officer (DO) compensates for the expected change in ship's trim at periscope depth [PD]. Unfortunately, the DO may not have the time to do this properly due to operational commitments. Watch to watch compensations are normally unsatisfactory. Since the SVP may change dramatically in shallow waters the old history may be invalid and the compensation wrong from the start. Many DO's prefer to go up to PD heavy enough to prevent broaching and get a better trim there.
Operating at periscope depth beneath a seaway, a submarine is in an unstable condition. As the free surface is approached, the seaway forces increase, trying to pull the submarine to the surface. To counter these forces, the ship’s ballast is changed and control surfaces are used, and manual operation for long periods at periscope depth taxes the ship’s control party. Operators must remain aware of the environmental conditions. If the sea becomes quiescent, the submarine will sink out. If the sea suction forces are greater than the ballast and planes authority, the submarine will broach the free surface increasing detection risk by several orders of magnitude. Other events, like temperature or salinity changes, can also have major effects on reliable depth keeping. Contributing to the environmental issues, the need to use minimum speed for a given sea state to control the detectable mast feather reduces the available planes authority, and increases the difficulty of depth control. The vast majority of problems with submarine depth control concerned course changing. There are several competing effects. Use of the rudder causes the ship to roll, reduces speed, and may introduce some moment. As the course changes, the effects of sea direction change. To maintain depth control requires adjustment of propeller speed, adjustment of trim, and very close attention by the ship's control party. All submersibles have a safe operating envelope (SOE). The boundaries of the SOE are dictated by the boat's ability to recover from a control plane casualty. the shallow limits are set to prevent either an inadvertent excursion above collision avoidance depth or an inadvertent broach. The deep limits are sliding with depth of water so that the submersible will not ground on the bottom.The pressure on a submarine's hull increases with depth, limiting the depth below the ocean surface at which it can operate. The water pressure increases by 44.45 pounds per square inch for every 100 feet of additional depth in salt water.
Submarine designers normally intend their creations to operate well away from the hull's physical limits, imposing a safety margin that varies from country to country [1.5 in the USA, 1.75 in the UK, and 2.0 in Germany]. Typically a submarine will have three diving depths:
A submarine's hull is normally constructed of steel, or exceptionally of titanium. Special High Yield [HY] steel alloys have been developed to increase the diving depth of submarines, although the improved depth performance of these alloys imposes a price of increased fabrication challenges. These special steels are denominated by their yield stress in thousands of pounds per square inch -- thus HY-80 steel has a yield stress of 80,000 pounds per square inch [corresponding to a depth of 1,800 feet], HY-100 a a yield stress of 100,000 pounds per square inch [corresponding to a depth of 2,250 feet], and so on.
