

Munition Deployed BDA (MDBDA) Sensor
This joint Industry-Air Force demonstration effort is designed to show the feasibility and usefulness of a munition deployed video sensor to view weapon impact and initial target destruction. The concept is to provide mission planners with the "CNN-like" video imagery of weapon impact for GPS guided munitions such as JDAM and JASSM.
Northrop-Grumman Corporation introduced their "Bomb Damage Assessment Concept" in May 96. Support for the concept was given by the JDAM and JASSM SPO's as well as the Air Force Research Laboratory (formerly Wright Laboratory).
 The initial concept used a stable aero-vehicle to house a video sensor, transmitter, battery, and antenna. The vehicle consists of a tuncated conical nose to house the camera, a cylindrical body four inches in diameter, and a flared afterbody. Wind tunnel testing and computational fluid dynamic simulations indicate the vehicle is stable for the entire flight regime. A simulation developed by Dr. Mark Costello of the US Military Academy, a visiting researcher to AFRL, indicates minimal impact on the GBU-10's performance.
The initial concept used a stable aero-vehicle to house a video sensor, transmitter, battery, and antenna. The vehicle consists of a tuncated conical nose to house the camera, a cylindrical body four inches in diameter, and a flared afterbody. Wind tunnel testing and computational fluid dynamic simulations indicate the vehicle is stable for the entire flight regime. A simulation developed by Dr. Mark Costello of the US Military Academy, a visiting researcher to AFRL, indicates minimal impact on the GBU-10's performance.
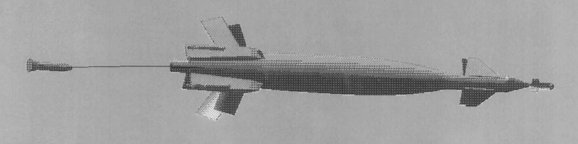 The BDA vehicle will be deployed from the munition immediately after release from the host aircraft. The tether that links the BDA vehicle to the munition is 1000 feet in length. Reel-out time for the vehicle is approximately 12 seconds while the drop time of the munition is 42 seconds. This leaves sufficient time for the BDA vehicle to stabilize. A 300 field of view on the video sensor insures that the weapon impact will be captured by the sensor.
The video sensor for this system uses technology leveraged from existing AFRL programs. The sensor itself is a COTS CCD camera that has been electronically modified with an "autogating" feature. The sensor, since it is tethered to the munition, will be traveling close to Mach 1 when the munition impacts the target. Blurring due to this motion and blooming of the CCD chip due to intense light levels during detonation are serious concerns which affect the quality of the imagery. The autogating feature of this sensor will compensate for these factors allowing for excellent stop action imagery.
The GBU-10 was selected as a test expedient platform to integrate the Northrop-Grumman designed BDA sensor system. For test purposes, ground based receiving stations will be used to collect the video imagery. A captive carry flight test will insure weapon/BDA integrity as well as verify the video telemetry link. Up to two inert warhead drops will follow the captive carry test to insure proper deployment of the BDA vehicle and establishment of the video downlink. A final live warhead drop would take place to obtain the "golden video" of the munition impact and initial target destruction.
Static detonation tests of a MK-84 warhead were conducted at Range C-74 on Eglin AFB. The event was observed by four BDA video sensors placed at 1000 feet behind the warhead. The captured imagery will help baseline sensor performance for the upcoming flight tests. Northrop-Grumman recently completed drop test of the BDA vehicle weapon attachment assembly from a balloon platform 1200 feet in the air. The results of this test gave valuable data on the tether payout dynamics. This data is being incorporated into simulations of the separation event. Northrop-Grumman also conducted a flight test of an operating BDA vehicle deployed from an aircraft. The BDA vehicle was reeled out from a wing pylon to 300 feet behind the aircraft. Excellent imagery of the aircraft were obtained even as the aircraft simulated a ballistic munition drop.
Technical difficulties have prevented success of the MDBDA Sensor Program. The flight test of the MDBDA system in May 1998, over Eglin's Test Range, was not fully successful due to entanglement of the BDA sensor vehicle with the tether. Northrop determined that the unstable deployment of the BDA caused the tether entanglement and subsequent breakage. Northrop developed an improved braking mechanism designed to deploy the BDA sensor under greater control. Northrop conducted its own surrogate flight tests of the improved system, but experienced limited success. Although Northrop demonstrated a controlled deployment of the BDA vehicle, the tether continued to break when fully deployed.
Northrop requested AAC approve a demonstration of a variant of the MDBDA concept. This alternative concept removes the tether from the system. The BDA camera in this new system will be ejected just prior to weapon impact. This scenario allows USAF Air Armament Center at Eglin AFB to assess the feasibility of an alternate weapon-borne BDA concept, as well as capture imagery representative of a tethered BDA sensor deployment. Demonstrations of the new system on an inert and live GBU-10 were originally scheduled for the Fall 1998; however, these tests were postponed due to adverse weather conditions on the scheduled days of the flight tests.
A tactical system, which may retain the benefits of the tether, will be much different.
The BDA vehicle will be deployed from the munition immediately after release from the host aircraft. The tether that links the BDA vehicle to the munition is 1000 feet in length. Reel-out time for the vehicle is approximately 12 seconds while the drop time of the munition is 42 seconds. This leaves sufficient time for the BDA vehicle to stabilize. A 300 field of view on the video sensor insures that the weapon impact will be captured by the sensor.
The video sensor for this system uses technology leveraged from existing AFRL programs. The sensor itself is a COTS CCD camera that has been electronically modified with an "autogating" feature. The sensor, since it is tethered to the munition, will be traveling close to Mach 1 when the munition impacts the target. Blurring due to this motion and blooming of the CCD chip due to intense light levels during detonation are serious concerns which affect the quality of the imagery. The autogating feature of this sensor will compensate for these factors allowing for excellent stop action imagery.
The GBU-10 was selected as a test expedient platform to integrate the Northrop-Grumman designed BDA sensor system. For test purposes, ground based receiving stations will be used to collect the video imagery. A captive carry flight test will insure weapon/BDA integrity as well as verify the video telemetry link. Up to two inert warhead drops will follow the captive carry test to insure proper deployment of the BDA vehicle and establishment of the video downlink. A final live warhead drop would take place to obtain the "golden video" of the munition impact and initial target destruction.
Static detonation tests of a MK-84 warhead were conducted at Range C-74 on Eglin AFB. The event was observed by four BDA video sensors placed at 1000 feet behind the warhead. The captured imagery will help baseline sensor performance for the upcoming flight tests. Northrop-Grumman recently completed drop test of the BDA vehicle weapon attachment assembly from a balloon platform 1200 feet in the air. The results of this test gave valuable data on the tether payout dynamics. This data is being incorporated into simulations of the separation event. Northrop-Grumman also conducted a flight test of an operating BDA vehicle deployed from an aircraft. The BDA vehicle was reeled out from a wing pylon to 300 feet behind the aircraft. Excellent imagery of the aircraft were obtained even as the aircraft simulated a ballistic munition drop.
Technical difficulties have prevented success of the MDBDA Sensor Program. The flight test of the MDBDA system in May 1998, over Eglin's Test Range, was not fully successful due to entanglement of the BDA sensor vehicle with the tether. Northrop determined that the unstable deployment of the BDA caused the tether entanglement and subsequent breakage. Northrop developed an improved braking mechanism designed to deploy the BDA sensor under greater control. Northrop conducted its own surrogate flight tests of the improved system, but experienced limited success. Although Northrop demonstrated a controlled deployment of the BDA vehicle, the tether continued to break when fully deployed.
Northrop requested AAC approve a demonstration of a variant of the MDBDA concept. This alternative concept removes the tether from the system. The BDA camera in this new system will be ejected just prior to weapon impact. This scenario allows USAF Air Armament Center at Eglin AFB to assess the feasibility of an alternate weapon-borne BDA concept, as well as capture imagery representative of a tethered BDA sensor deployment. Demonstrations of the new system on an inert and live GBU-10 were originally scheduled for the Fall 1998; however, these tests were postponed due to adverse weather conditions on the scheduled days of the flight tests.
A tactical system, which may retain the benefits of the tether, will be much different.
Sources and Resources
http://www.fas.org/man/dod-101/sys/smart/mdbda.htm
Maintained by Robert Sherman
Originally created by John Pike
Updated Monday, November 29, 1999 1:32:39 PM